WSL2搭建无人机仿真环境
启用WSL服务
什么是WSL?如何使用?
我们将基于视频中介绍的几点便利功能,搭建无人机仿真环境
下载Ubuntu
根据视频中的流程开启windows系统的WSL服务
接着,我们下载Ubuntu20.04版本(之后会解释为什么需要这个版本)
wsl --install Ubuntu-20.04 --web-download提示
如果出现以下问题,可以下载Watt Toolkit尝试加速 
基本配置
默认用户配置
因为我们之后会进行大量import和export的备份操作,而在还原备份文件时,会默认为root用户,所以我们需要将默认用户修改为我们自己创建的用户
sudo vim /etc/wsl.conf这里使用vim对文件内容进行编辑,初次使用可能会感觉有点反人类😰
首先,按i进入编辑模式(左下角出现INSERT)
然后,在文件中添加以下内容
[user]
default=你的用户名最后,按ESC退出INSERT模式,按:wq来保存退出vim
提示
感兴趣的同学可以通过以下视频学习vim的基本用法
显示优化(可选)
注意
此步设置仅供参考,最好还是不要执行,因为我后来发现了一些显示上的恶性bug
因为我们之后会用到gazebo的图形化窗口,可能会出现字体太小等问题,我们可以通过修改环境变量的方式来解决
vim ~/.bashrc按住shift+g或者大写的G就可以跳转到文件底部,在底部添加
# >>> zoom application windows >>>
export QT_QPA_PLATFORM="wayland;xcb"
export QT_AUTO_SCREEN_SCALE_FACTOR=0
export QT_ENABLE_HIGHDPI_SCALING=0
export QT_SCALE_FACTOR=1.5 # 此处调节缩放比例
# <<< zoom application windows <<<退出vim,并输入以使得刚刚的修改生效
source ~/.bashrc提示
.bashrc是bash终端的配置文件,感兴趣的同学可以自行搜索
vs code服务(十分重要!)
使用vim是不是还挺麻烦的?其实我们可以用windows上的vs code来修改文件(为什么不早说😢)
首先,在vs code上找到WSL插件并下载,启用
接着,只需要在终端输入
code等待下载完成就可以了!
安装ROS
正片开始!
我们使用小鱼ROS一键安装,原因就是这个脚本可以自动帮我们配置网络环境,找到合适的版本,安心省事!
wget http://fishros.com/install -O fishros这个指令可以帮助我们下载到安装脚本
运行脚本
. fishros接着我们跟着引导,选择安装ROS,由于我们还没换源,可以选择换源
接着我么选择安装ROS1 noetic的桌面版,因为我发现网上有关ROS1的教程会更多一些(这也是我为何选择Ubuntu20.04的原因)
安装完成后,我们可以新建一个终端,输入roscore查看是否安装成功
检查完毕,按住ctrl+C可以结束进程
提示
我们还可以用小鱼脚本安装rosdep(可选)
安装MAVROS
MAVROS是一个ROS软件包,有了它就可以让ROS与飞控通信。
sudo apt install ros-$ROS_DISTRO-mavros ros-$ROS_DISTRO-mavros-extrasgit clone https://gitee.com/tyx6/geographiclib_datasets_tools.git
cd geographiclib_datasets_tools/
chmod a+x ./install_geographiclib_datasets.sh
sudo ./install_geographiclib_datasets.sh下载完成后输入roscd mavros,如果发现跳转到了/opt/ros/noetic/share/mavros目录,即代表安装成功
下载QGroundControl
前往官网QGroundControl,下载windows版本,可以直接与我们的linux子系统搭建的仿真环境联通!
安装windows版本的过程,类似于windows上下载其他应用的过程,所以这里就不赘述了
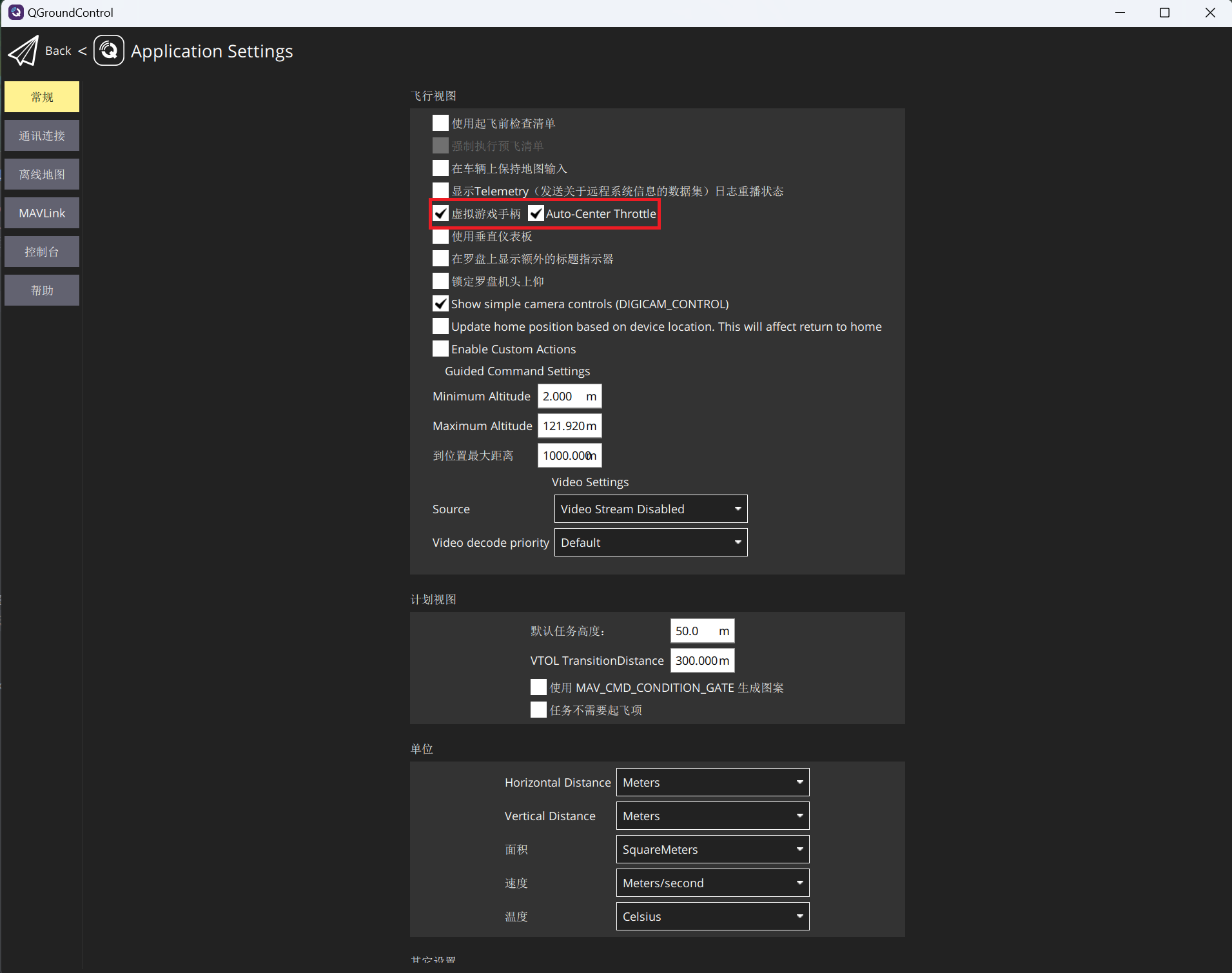
这里推荐启用虚拟手柄,方便控制
克隆PX4仓库
方法1:从github上克隆源代码(不推荐)
git clone https://github.com/PX4/PX4-Autopilot.git # 下载源码
mv PX4-Autopilot PX4_Firmware # 更改目录名cd PX4_Firmware
git checkout -b dev v1.13.2 # 切换版本
git submodule update --init --recursive # 更新下载子模块
# 比较慢,可能需要使用镜像源方法2:使用网盘或者从QQ群下载
# 在windows上的下载路径是以挂载卷的形式
mv 下载的路径/PX4_Firmware_v1.13.2.zip ~ # 移动到linux的工作目录里
# 当然,你也可以直接从资源管理器中拖过去
sudo apt install unzip # 下载解压工具
unzip PX4_Firmware_v1.13.2.zip解压完成后,执行以下指令,添加可执行脚本
rm PX4_Firmware_v1.13.2.zip # 可以删除压缩包
cd PX4_Firmware
wget https://gitee.com/tyx6/mytools/raw/main/px4/set_executable.sh
chmod +x set_executable.sh # 设置权限
./set_executable.sh # 执行安装相关依赖和gazebo
cd ~/PX4_Firmware/Tools/setup
chmod +x ubuntu.sh
./ubuntu.sh --no-nuttx
# 脚本执行时间,跟个人网络有关,可能需要一段时间提示
这是官方提供的脚本,有两个可选参数
--no-sim-tools 不安装仿真环境
--no-nuttx 不安装交叉编译环境
如果需要自己编译飞控固件,烧录到飞控中,那就需要交叉编译环境
sudo apt update && sudo apt upgrade
sudo apt-get install ros-$ROS_DISTRO-gazebo-ros-pkgs ros-$ROS_DISTRO-gazebo-ros-control安装好后,输入gazebo验证是否安装完成 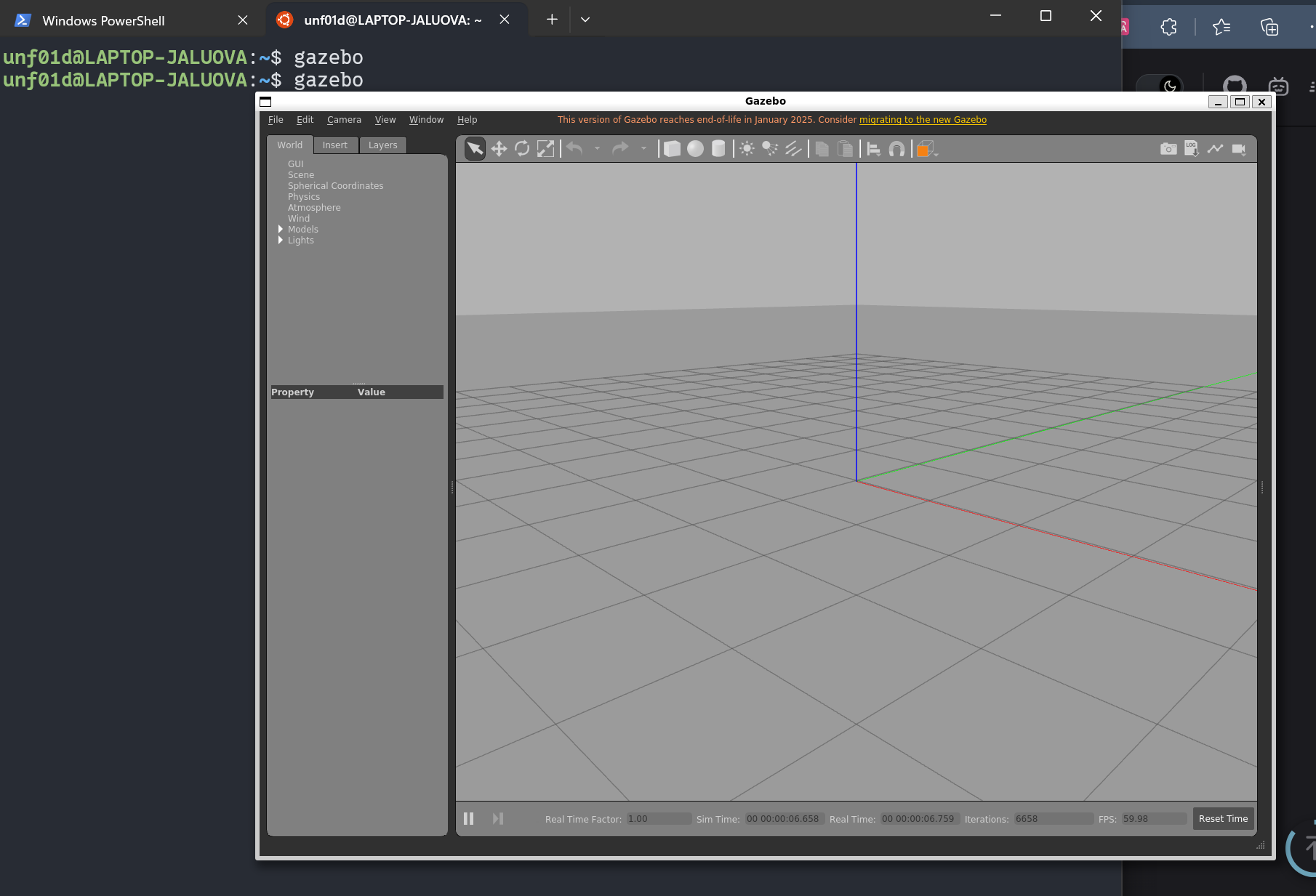
编译无人机仿真环境
cd ~/PX4_Firmware
make px4_sitl_default gazebo # 这步可能有点慢,跟电脑配置有关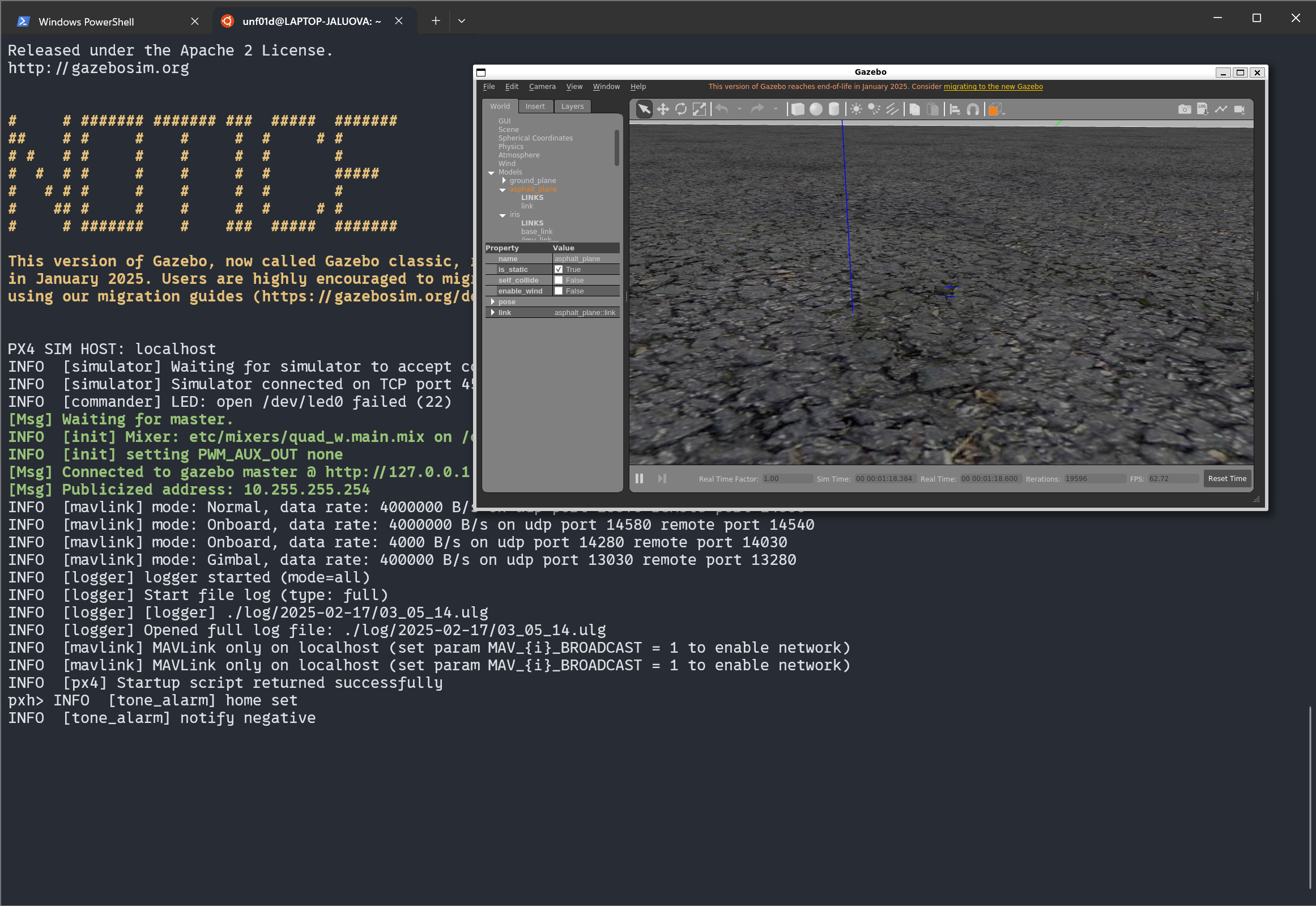
测试
编辑.bashrc
code ~/.bashrc添加
# >>> PX4_Firmware >>>
# source ~/catkin_ws/devel/setup.bash # 这个是个人的ROS工作空间,我们之后可以创建
source ~/PX4_Firmware/Tools/setup_gazebo.bash ~/PX4_Firmware/ ~/PX4_Firmware/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/PX4_Firmware
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/PX4_Firmware/Tools/sitl_gazebo
# <<< PX4_Firmware <<<保存退出并source ~/.bashrc
应该可以看到一段类似于这样的显示内容

这时候,我们就可以在任何目录下,启用仿真环境,输入
roslaunch px4 mavros_posix_sitl.launch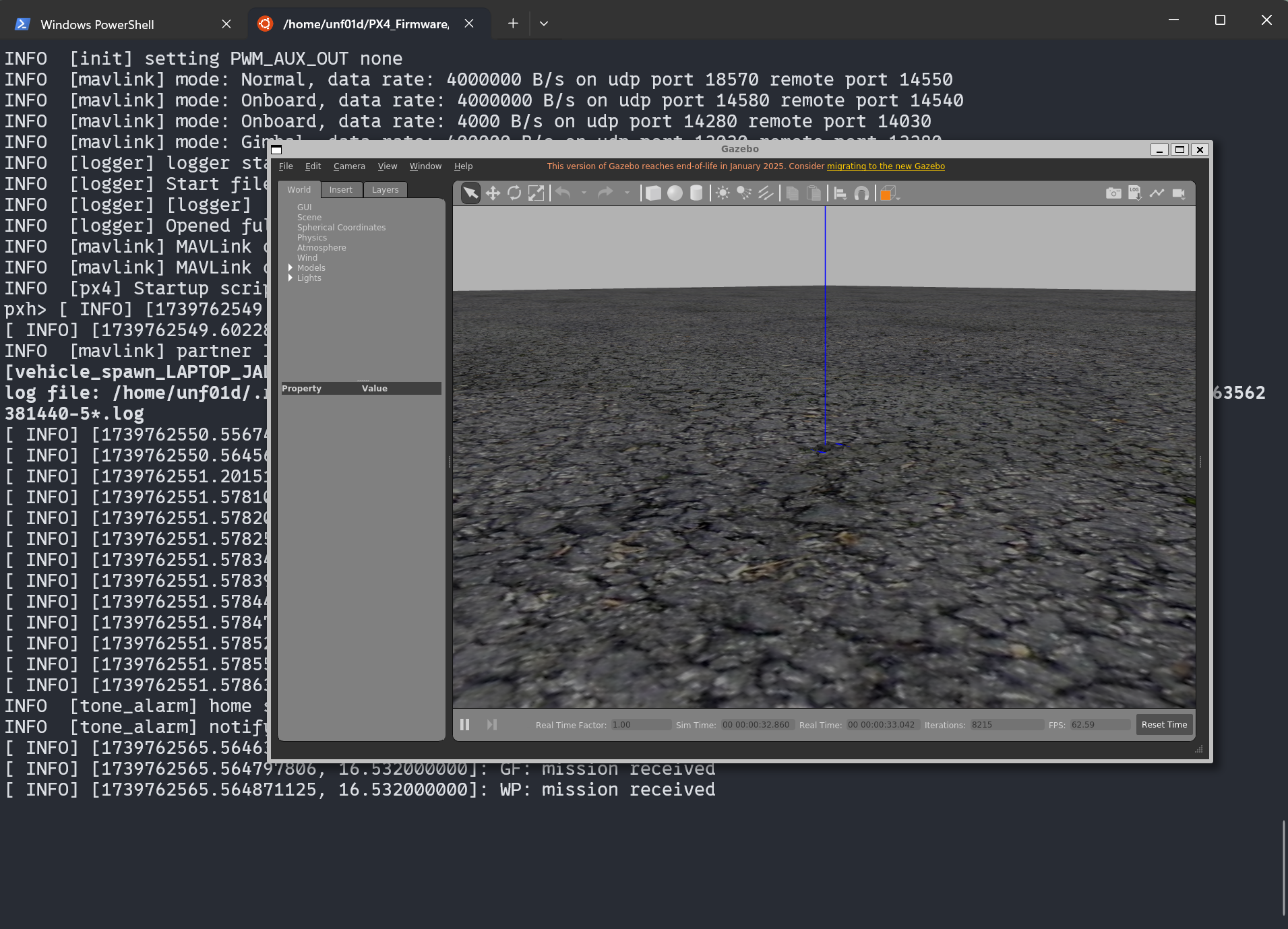
接着新建一个终端,运行下面命令,查看MAVROS与仿真无人机通信状况
rostopic echo /mavros/state | grep connected # 只查看 connected 信息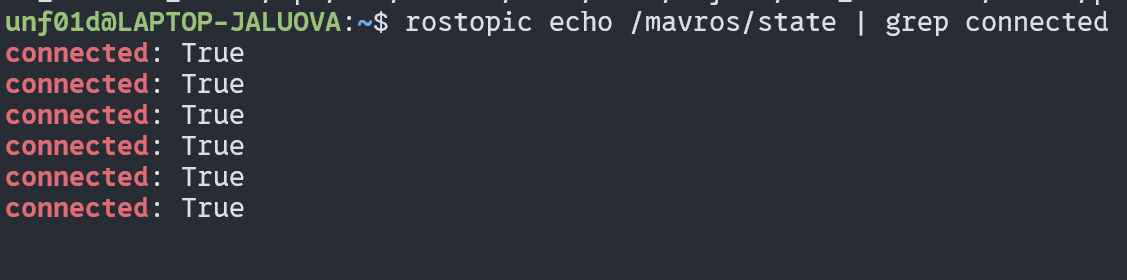
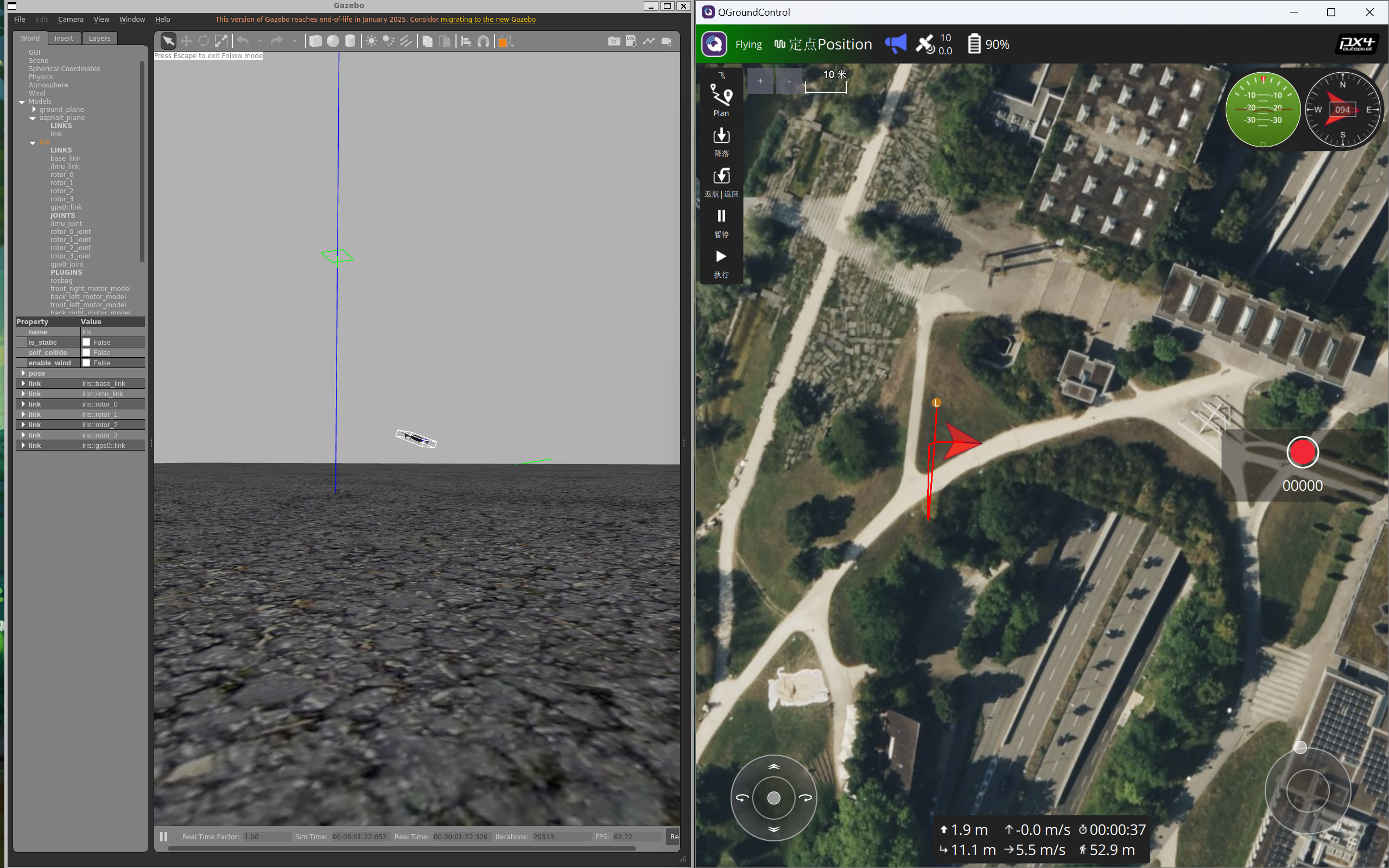
我们还可以打开QGC地面站来对无人机进行操控
总结 & 参考文章
OK😊!到此,我们的无人机仿真环境就基本配置完成了。我这篇文章主要参考的是(最新)ubuntu搭建PX4无人机仿真环境(4) ——仿真环境搭建(以Ubuntu 18.04,ROS1 Melodic 为例),也利用了不少相关资源,在此表示非常感谢!!
如果在配置过程中遇到了问题,请及时在底部评论区留言。